
北京一家机器人研发团队,对外展示了可以连续后空翻的人形机器人。
上个月,人形机器人做前空翻的视频上了热搜。这两天,人形机器人的技能又提升了。北京一家机器人研发团队,对外展示了可以连续后空翻的人形机器人。

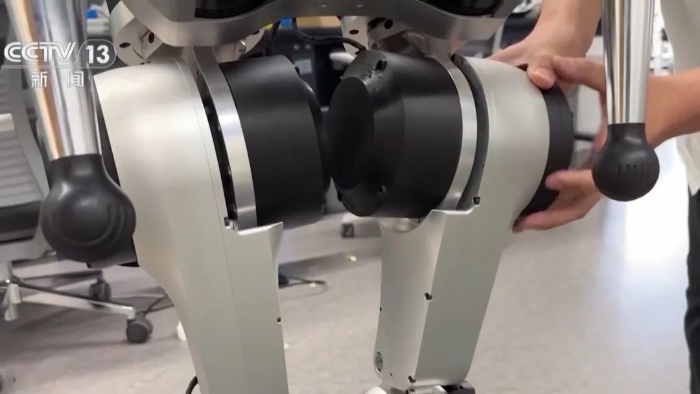
为了实现机器人后空翻的稳定性,团队在硬件结构上进行了创新设计。他们尽可能将重量较大的关节向胯部集中,从而让机器人在翻转过程中使的力气最小。同时,他们采用了功率更为强劲的电机以及更为轻的材料,让机器人具有更大的爆发力。
虽然后空翻的动作难度大,但据了解,机器人团队仅用了三周,就让机器人学会了这个特殊技能。
-
首先,团队在数字世界中,通过一系列动力学计算优化,得到一个翻跟头的最优轨迹。
-
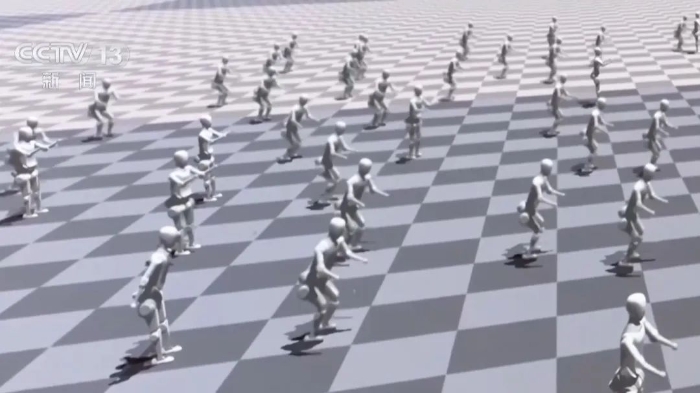
随后,他们在虚拟仿真中,通过强化学习的方法,让成百上千的机器人模仿这个翻跟头的最优轨迹,不断试错。
-
由于后空翻是一个相对较难的动作,团队还在训练中加入了一种课程学习的方法,让机器人像人去上课一样,从易到难,一点点完成精准的轨迹复刻。
-
随后,再将训练好的算法迁移到机器人本体上,通过反复测试,在仿真世界和机器人真机里不断进行系统优化,让真实的机器人也能具备复刻后空翻的能力。
主题测试文章,只做测试使用。发布者:参考消息网,转转请注明出处:https://www.cns1952.com/gov/9303.html